Pytorch官方英文文档:https://pytorch.org/docs/stable/torch.html?
Pytorch中文文档:https://pytorch-cn.readthedocs.io/zh/latest/
1. Pytorch的数据读取机制
在学习Pytorch的数据读取之前,我们得先回顾一下这个数据读取到底是以什么样的逻辑存在的, 上一次,我们已经整理了机器模型学习的五大模块,分别是数据,模型,损失函数,优化器,迭代训练:

而这里的数据读取机制,很显然是位于数据模块的一个小分支,下面看一下数据模块的详细内容:
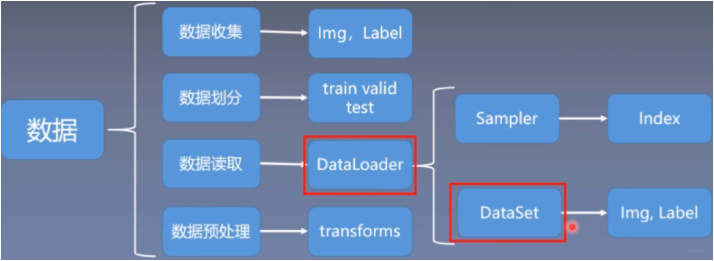
数据模块中,又可以大致分为上面不同的子模块, 而今天学习的DataLoader和DataSet就是数据读取子模块中的核心机制。 了解了上面这些框架,有利于把知识进行整合起来,到底学习的内容属于哪一块。下面正式开始DataLoader和Dataset的学习:
1.1 DataLoader
torch.utils.data.DataLoader(): 构建可迭代的数据装载器, 我们在训练的时候,每一个for循环,每一次iteration,就是从DataLoader中获取一个batch_size大小的数据的。
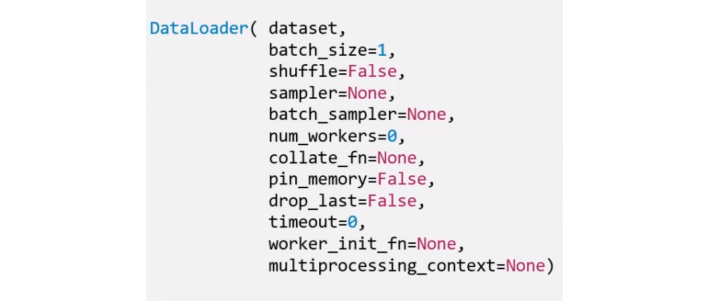
DataLoader的参数很多,但我们常用的主要有5个:
- dataset: Dataset类, 决定数据从哪读取以及如何读取
- bathsize: 批大小
- num_works: 是否多进程读取机制
- shuffle: 每个epoch是否乱序
- drop_last: 当样本数不能被batchsize整除时, 是否舍弃最后一批数据
要理解这个drop_last, 首先,得先理解Epoch, Iteration和Batchsize的概念:
- Epoch: 所有训练样本都已输入到模型中,称为一个Epoch
- Iteration: 一批样本输入到模型中,称为一个Iteration
- Batchsize: 一批样本的大小, 决定一个Epoch有多少个Iteration
举个例子就Ok了, 假设样本总数80, Batchsize是8, 那么1Epoch=10 Iteration。 假设样本总数是87, Batchsize是8, 如果drop_last=True, 那么1Epoch=10Iteration, 如果等于False, 那么1Epoch=11Iteration, 最后1个Iteration有7个样本。
1.2 Dataset
torch.utils.data.Dataset(): Dataset抽象类, 所有自定义的Dataset都需要继承它,并且必须复写__getitem__()这个类方法。
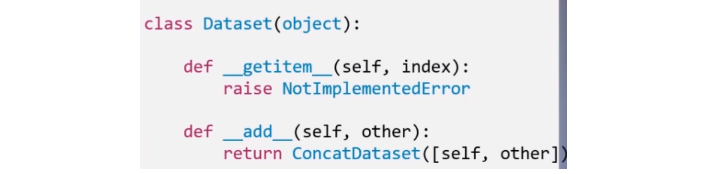
__getitem__方法是Dataset的核心,作用是接收一个索引, 返回一个样本, 看上面的函数,参数里面接收index,然后我们需要编写究竟如何根据这个索引去读取我们的数据部分。
1.3 数据读取机制具体怎么用呢?
上面只是介绍了两个数据读取机制用到的两个类,那么具体怎么用呢? 我们就以人民币二分类的任务进行具体查看, 但是查看之前我们要带着关于数据读取的三个问题去看:
读哪些数据? 我们每一次迭代要去读取一个batch_size大小的样本,那么读哪些样本呢?what
从哪读数据? 也就是在硬盘当中该怎么去找数据,在哪设置这个参数。where
怎么读数据?how
下面我们从实验中边看边学习:人民币分类的任务其实也非常简单, 就是
我们的数据集是1块的图片100张,100的图片100张,我们的任务就是训练一个模型,来帮助我们对这两类图片进行分类。 这个说清楚了之后, 我们下面就带着上面的三个问题,来看我们这个任务的数据读取部分。
1 | #==========================================step 1/5 准备数据=============================== |
代码不用具体看懂,看懂这里的逻辑就可以,首先一开始,是路径部分, 也就是训练集和测试集的位置,这个其实就是我们上面的第二个问题从哪读数据,然后是transforms图像数据的预处理部分, 这个不用管, 后面会介绍transforms这个模块,这次最重要的就是MyDataset实例还有后面的DataLoader,这个才是我们这次介绍的重点。 我们下面详细剖析(这个地方会涉及到代码的一些调试,所以尽量慢一些):
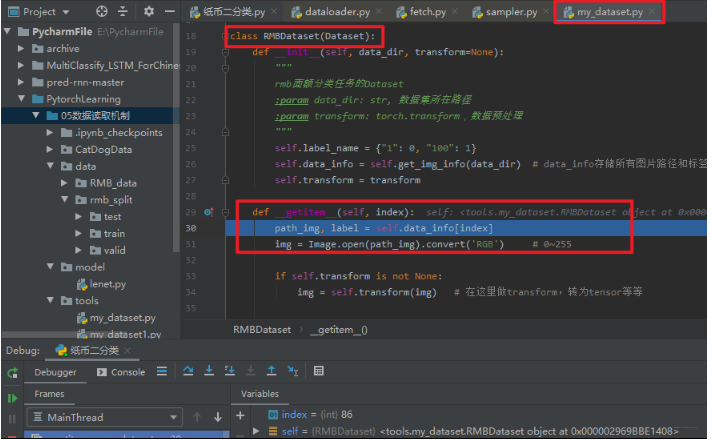
我们从train_data = RMBDataset(data_dir=train_dir, transform=train_transform)开始, 这一句话里面的核心就是RMBDataset,这个是我们自己写的一个类,继承了上面的抽象类Dataset,并且重写了__getitem__()方法, 这个类的目的就是传入数据的路径,和预处理部分(看参数),然后给我们返回数据,下面看它是怎么实现的(Pycharm里面按住控制键,然后点击这个类就进入具体实现):
1 | class RMBDataset(Dataset): |
看到这么多代码估计又看不下去了,但是得养成读源码的习惯,依然是看逻辑关系,我觉得看源代码最好是先把逻辑关系给看懂, 然后再具体深入进去看具体细节。 逻辑的话其实也很简单,这里面重点就是__getitem__()这个方法的实现了,我们说过从这里面,我们要拿到我们的训练样本, 那么怎么拿呢? 这个函数的第一行,会看到有个data_info[index], 我们只要给定了index, 那么就是通过这句代码进行获取样本的,因为这个方法后面的都比较好理解,无非就是拿到图片,然后处理,然后返回的一个逻辑。
所以上面的重点又落在了data_info[index]上面, 这句代码干了个什么事情呢? 那么就得看看它是咋来的,所以就该往上看这个类的初始化部分__init__,我们可以看到这个data_info是RMBDataset这个类的成员,我们会看到self.data_info = self.get_img_info(data_dir)这句代码, 就找到了data_info的来源, 那么完了吗? 当然没有,我们又发现这个又调用了get_img_info(data_dir)方法, 这个才是最终的根源。 所以我们又得看这个函数get_img_info(data_dir)做了什么? 我们会发现这个函数的参数是data_dir, 也就是数据在的路径,那么如果想想的话,这个函数应该是要根据这个路径去找数据的, 果然,我们把目光聚焦到这个函数发现,这个函数写了这么多代码,其实就干了一件事,根据我们给定的路径去找数据,然后返回这个数据的位置和标签。 返回的是一个list, 而list的每个元素是元组,格式就是[(样本1_loc, label_1), (样本2_loc, label_2), …(样本n_loc, label_n)]。这个其实就是data_info拿到的一个list。 有了这个list,然后又给了data_info一个index,那么取数据不就很容易了吗? data_info[index] 不就取出了某个(样本i_loc, label_i)。
这样再回到__getitem__()这个方法, 是不是很容易理解了, 第一行我们拿到了一个样本的图片路径和标签。然后第二行就是去找到图片,然后转成RGB数值。 第三行就是做了图片的数据预处理,最后返回了这张图片的张量形式和它的标签。 注意,这里是一个样本的张量形式和标签。 这就是RMBDataset这个类做的事情。应该讲明白了吧, 讲源码还真没经验,我也是第一次看,第一次讲。 有了这样的一个逻辑,知道每个函数大致在做什么事情之后,然后就可以取看具体的实现细节了,这个就不带着看了,哈哈。
那么你可能有个疑问了,我们肯定不是要获取一张图片啊, 我们不是要获取batch_size张图片吗? 这个应该怎么实现呢? 这是个好问题, 那么这个就要问下面的DataLoader了。
我们看这句代码train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True), 看DataLoader这个类,接收的参数就是上面的RMBDataset,我们知道这个是返回一个样本的张量和标签,然后又跟了一个BATCH_SIZE, 看到这个,你心里应该有数了,这个不就是说一个batch里面有多少个样本吗? 如果有了一个batch的样本数量,有了样本总数,就能得到总共有多少个batch了。 后面的shuffle,这个是说我取图片的时候,把顺序打乱一下,不是重点。 那么你是不是又好奇点东西了, 这个DataLoader在干啥事情呢? 其实它在干这样的事情,我们只要指定了Batch_SIZE, 比如指定10个, 我们总共是有100个训练样本,那么就可以计算出批数是10, 那么DataLoader就把样本分成10批顺序打乱的数据,每一个Batch_size里面有10个样本且都是张量和标签的形式,那么DataLoader是怎么做到的呢? 哈哈,如果想弄明白这个问题,又得看看DataLoader的源码了, 但是我看了一下发现,这个不得了,源码太长了,没法在这里具体显示, 那怎么办呢? 我们可以先看看这个train_loader到底是个啥,打印了一下,是这样的一个东西:<torch.utils.data.dataloader.DataLoader object at 0x000001D8C284DBC8>, 看了这是一个DataLoader对象了, 也没法进行研究了,现在只知道这个东西能够返回那Batch_size个批次的数据,赋值给了train_loader, 显然这是一个可迭代的对象。 那么很容易就可以想到,如果下面我们具体训练的时候,肯定是要遍历这个train_loader, 然后每一次取一批数据进行训练。 哈哈,机智如你,果不其然,我们从具体使用的时候,看看每一批数据究竟是如何获得的? 下面我们就直接从训练的部分看,像中间的模型,损失函数,优化器不是重点,所以这里先不放上来:
1 | for epoch in range(MAX_EPOCH): |
上面就是训练部分的核心了,这个比较好理解, 两层循环,外循环表示的迭代Epoch,也就是全部的训练样本喂入模型一次, 内循环表示的批次的循环,每一个Epoch中,都是一批批的喂入, 那么数据读取具体使用的核心就是for i, data in enumerate(train_loader)这句话了, 所以我们以调试的方式看看这个函数究竟是怎么去得到数据的?
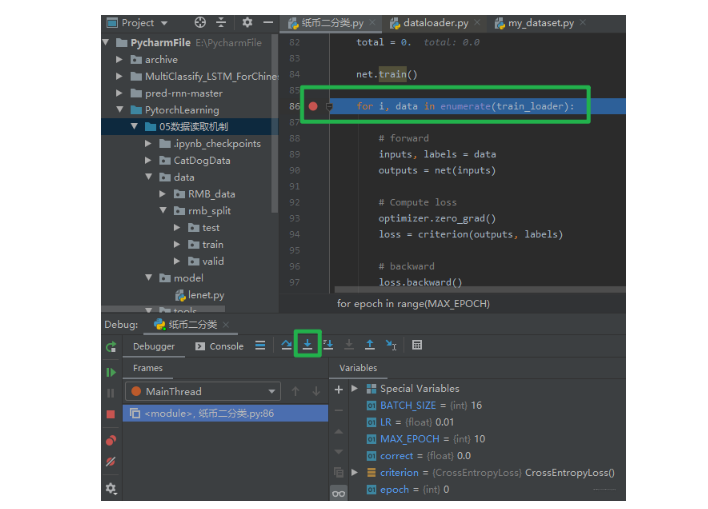
在这一行打断点,然后debug,程序运行到这一行,然后点击下面的stepinto步入这个函数里面,我们看看调用的DataLoader里面的哪个方法, 由于DataLoader的源码太多,方法很多,所以在具体使用的时候看这个流程就不用放上一些不必要的代码, 减少冗余。
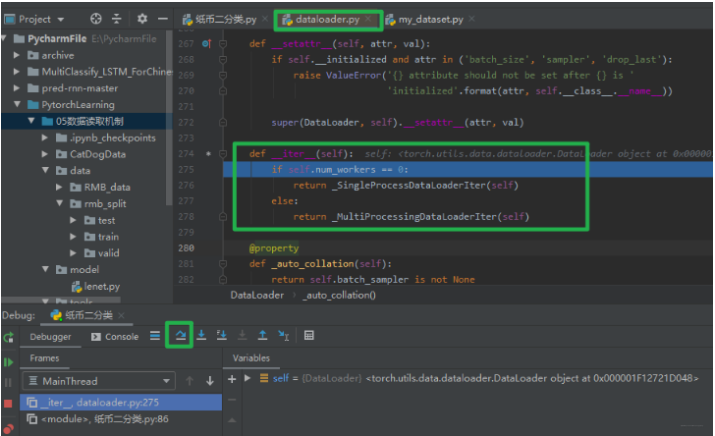
这样就会看到,程序跳转到了DataLoader的__iter__(self)这个方法,毕竟这是个迭代的过程, 但是简单的瞄一眼这个函数,就会发现就一个判断,说的啥呢? 原来在说是用单进程还是用多进程读取机制进行处理, 关于读取数据啥也没干。 所以这个也不是重点, 我们使用stepover进行下一步,然后在stepinto进入单进程的这个机制里面
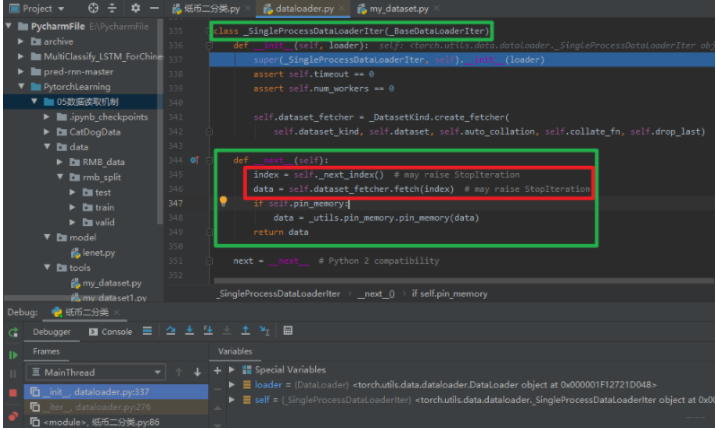
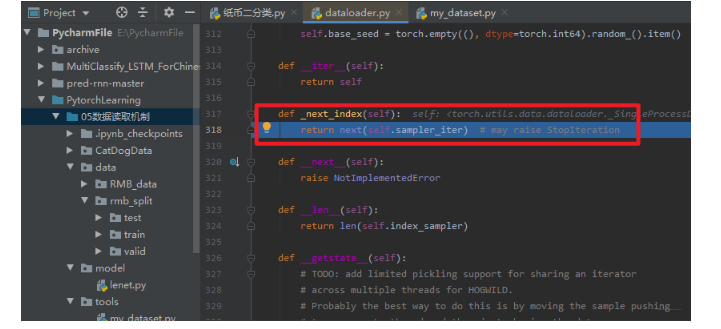
在这里面会看到点玄机了,这个机制里面比较重要的一个方法就是__next__(self), 上面不是说RMBDataset函数是能返回一个样本和标签吗? 这里的这个next, 看其字面意义就知道这个是获取下一个样本和标签,重要的两行代码就是红框的那两行,self.__next__index()获取下一个样本的index, 然后self.dataset_fetcher.fetch(index)根据index去获取下一个样本, 那么是怎么做到的? 继续调试:将光标放到__next__index()这一行,然后点击下面的run to cursor图表,就会跳到这一行,然后stepinto
发现,这里是返回了一个return next(self.sampler_iter) , 所以重点应该是这个东西,我们继续stepinto
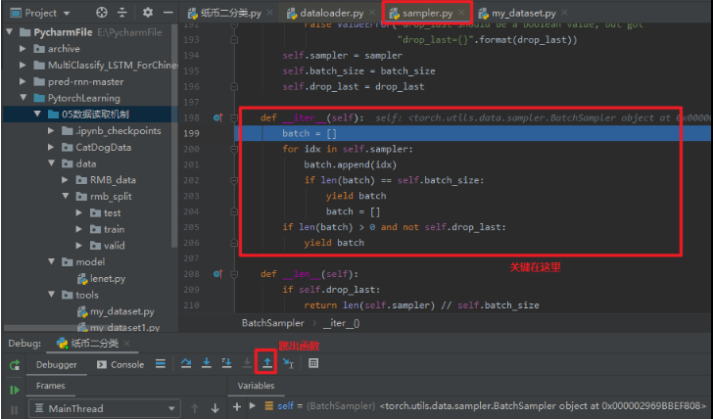
这里发现进入了sampler.py, 这里面重要的就是这个__iter__(self), 这个方法正是一次次的去采样我们的数据的索引,然后够了一个batch_size了就返回了。 那这一次取到的哪些样本的索引呢? 我们可以跳出这个函数,回去看看(连续两次跳出函数,回到dataloader.py):
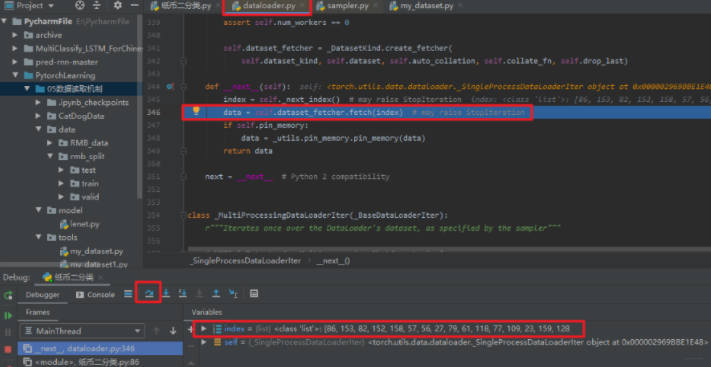
然后stepover到data这一行, 这个意思就是说,index这一样代码执行完毕,我们可以看到最下面取到的index(可以和上上张图片,没执行这个函数的时候对比一下),我们的batch_size设置的16, 所以通过上面的sampler.py获得了16个样本的索引。
这样,我们就有了一个批次的index, 那么就好说了,根据index取不就完事了, 所以第二行代码data = self.dataset_fetcher.fetch(index)就是取数据去了,重点就是这里的dataset_fetcher.fetch方法, 我们继续调试看看它是怎么取数据的。
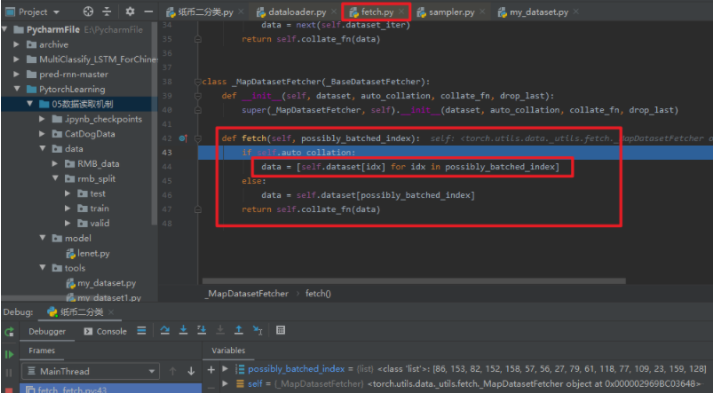
这样进入了fetch.py, 然后核心是这里的fetch方法,这里面会发现调用了self.dataset[idx]去获取数据, 那么我们再步入一步,就看到了奇迹:
会发现,这个方法跳到了我们写的RMBDataset这个类里面,调用了__getitem__方法,这个我们知道是获取一个样本的, 那么就拿到了这个样本的张量和标签。而fetch里面的那个方法是一个列表推导式,所以通过这个方法就能够获取一个batch大小的样本。
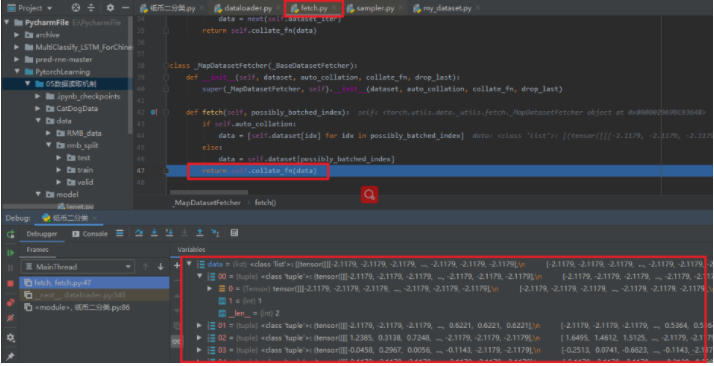
取完了一个批次, 然后进入self.collate_fn(data)进行整合,就得到了我们一个批次的data,最终我们返回来。
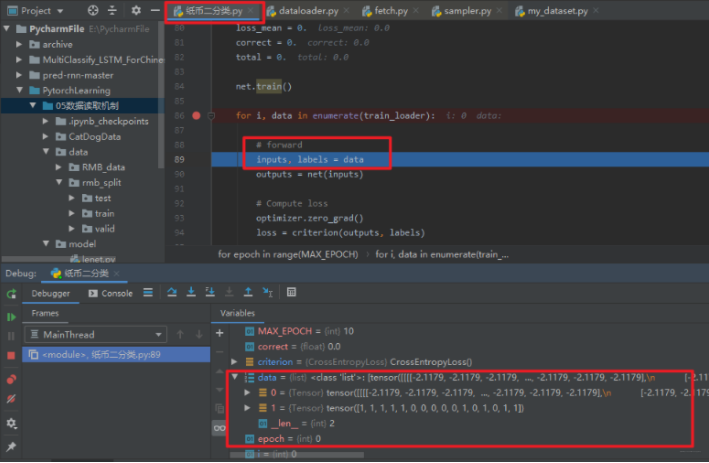
就看到了我们第一个批次获得的数据样本了。 我们知道,这个train_loader已经把样本分成了一个个的batch, 共batch_size批,所以通过enumerate进行迭代就可以一批批的获取,然后训练模型了。 这样所有的批次数据都喂入了模型,就完成了一次epoch。
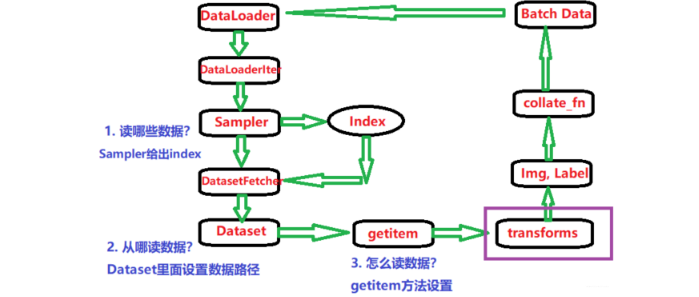
好了, 上面就是DataLoader读取数据的过程了,可能代码调试的过程确实比较乱,或许看不大懂,所以我们基于那三个问题梳理一遍逻辑,把逻辑关系看懂就好了, 并且最后用灵魂画笔来个流程图再进行梳理。 还记得我们的三个问题吗?
- 读哪些数据? 这个我们是根据Sampler输出的index决定的
- 从哪读数据? 这个是Dataset的data_dir设置数据的路径,然后去读
- 怎么读数据? 这个是Dataset的getitem方法,可以帮助我们获取一个样本
我们知道,DataLoader读取数据的过程比较麻烦,用到了四五个.py文件的跳转,所以梳理这个逻辑关系最好的方式就是流程图:
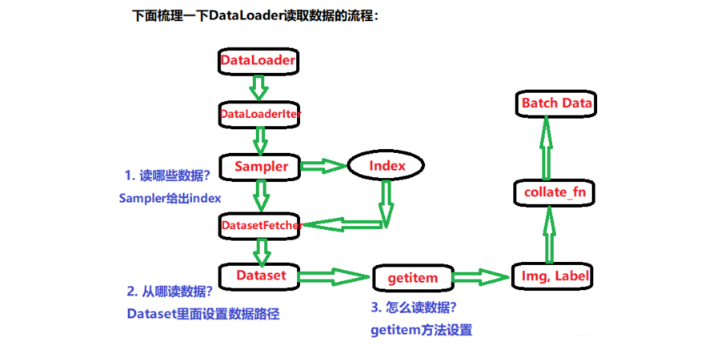
通过这个流程图,把DataLoader读取数据的流程梳理了一遍,具体细节不懂没有关系,但是这个逻辑关系应该要把握住,这样才能把握宏观过程,也能够清晰的看出DataLoader和Dataset的关系。 根据前面介绍,DataLoader的作用就是构建一个数据装载器, 根据我们提供的batch_size的大小, 将数据样本分成一个个的batch去训练模型,而这个分的过程中需要把数据取到,这个就是借助Dataset的getitem方法。
这样也就清楚了,如果我们想使用Pytorch读取数据的话,首先应该自己写一个MyDataset,这个要继承Dataset类并且实现里面的__getitem__方法,在这里面告诉机器怎么去读数据。 当然这里还有个细节,就是还要覆盖里面的__len__方法,这个是告诉机器一共有多少个样本数据。 要不然机器没法去根据batch_size的个数去确定总批次有多少。这个写起来也很简单,返回总的样本的个数即可。
1 | def __len__(self): |
这样, 机器就可以根据Dataset去硬盘中读取数据,接下来就是用DataLoader构建一个可迭代的数据装载器,传入如何读取数据的机制Dataset,传入batch_size, 就可以返回一批批的数据了。 当然这个装载器具体使用是在模型训练的时候。
好了,上面就是Pytorch读取机制DataLoader和Dataset的原理部分了。
人民币二分类的数据模块里面,除了数据读取机制DataLoader,还涉及了一个图像的预处理模块transforms, 是对图像进行预处理的,下面我们再看看这个的原理, 再搞定这个细节,人民币二分类任务的数据模块就无死角了。
2. Pytorch的图像预处理transforms
transforms是常用的图像预处理方法, 这个在torchvision计算机视觉工具包中,我们在安装Pytorch的时候顺便安装了这个torchvision(可以看看上面的搭建环境)。 在torchvision中,有三个主要的模块:
torchvision.transforms: 常用的图像预处理方法, 比如标准化,中心化,旋转,翻转等操作trochvision.datasets: 常用的数据集的dataset实现, MNIST, CIFAR-10, ImageNet等torchvision.models: 常用的模型预训练, AlexNet, VGG, ResNet, GoogLeNet等。
我们这次看图像预处理模块transforms, 主要包括下面的方法:
数据中心化,数据标准化,缩放,裁剪,旋转,翻转,填充,噪声添加,灰度变换,线性变换,仿射变换,亮度、饱和度及对比度变换。
2.1 看看二分类任务中用到的transforms的方法
下面我们可以看看人民币二分类任务中用到的图像预处理的方法了:
导入:import torchvision.transforms as transforms。
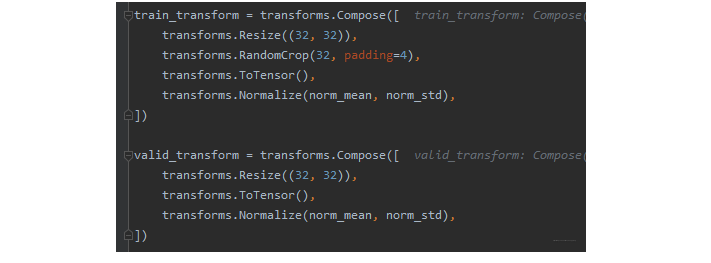
transforms.Compose方法是将一系列的transforms方法进行有序的组合包装,具体实现的时候,依次的用包装的方法对图像进行操作。transforms.Resize方法改变图像大小transforms.RandomCrop方法对图像进行裁剪(这个在训练集里面用,验证集就用不到了)transforms.ToTensor方法是将图像转换成张量,同时会进行归一化的一个操作,将张量的值从0-255转到0-1transforms.Normalize方法是将数据进行标准化
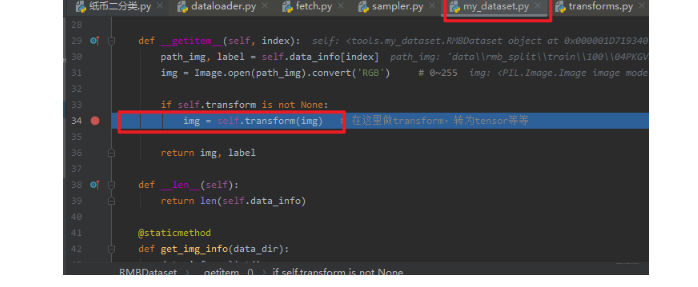
这个机制是怎么运行的这里就不多说了,因为我们这个函数是在RMBDataset的__getitem__方法中调用的。也就是在这里处理的图像。 至于transform函数的源码,这里就不去看了。
1 | def __getitem__(self, index): |
但是逻辑关系依然要知道:
了解了图像处理的transforms机制,我们下面学习一个比较常用的数据预处理机制,叫做数据标准化:
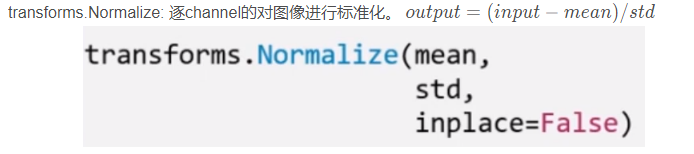
这个参数就不用解释了吧。 好吧, 再进行调试一下,看看是怎么变的吧:
依然是先打断点,然后步入这个函数:
我们进入了transforms.py, 这里面的__call__里面就是那一系列的数据处理方法
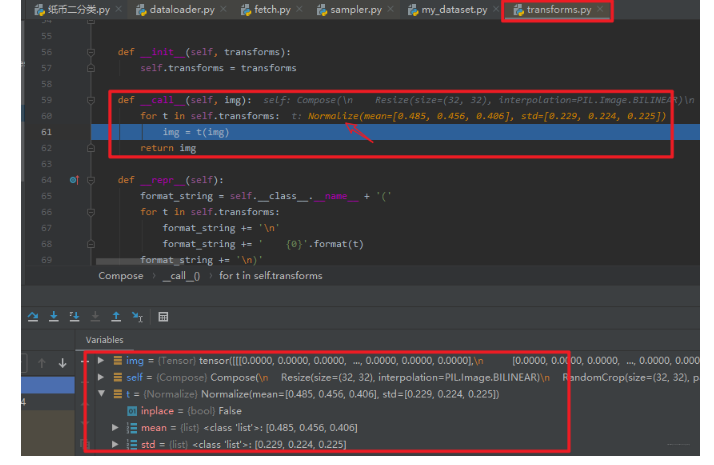
然后点几次stepover就到了Normalize这个操作,这时候我们再次步入,到了Normalize类, 这里面有一个call函数调用了pytorch库里面的Normalize函数, 我们再次步入:
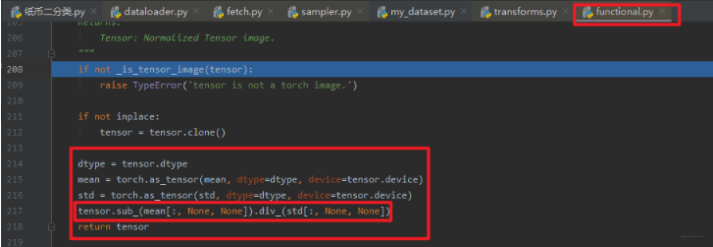
这里就有图有真相了。
Normalize的处理作用就是有利于加快模型的收敛速度。 关于细节,这里可能没有必要整理的这么细, 我这里整理是顺便学习一下代码的debug的过程,这个比了解Normalize的细节本身更加重要。
2.2 transforms的其他图像增强方法
数据增强
数据增强又称为数据增广, 数据扩增,是对训练集进行变换,使训练集更丰富,从而让模型更具泛化能力, 下面是一个数据增强的小例子(原来当初的我们就类似于机器啊,哈哈)。
图像裁剪
transforms.CenterCrop(size): 图像中心裁剪图片, size是所需裁剪的图片尺寸,如果比原始图像大了, 会默认填充0。transforms.RandomCrop(size, padding=None, pad_if_needed=False, fill=0, padding_mode='constant): 从图片中位置随机裁剪出尺寸为size的图片, size是尺寸大小,padding设置填充大小(当为a, 上下左右均填充a个像素, 当为(a,b), 上下填充b个,左右填充a个,当为(a,b,c,d), 左,上,右,下分别填充a,b,c,d个), pad_if_need: 若图像小于设定的size, 则填充。 padding_mode表示填充模型, 有4种,constant像素值由fill设定, edge像素值由图像边缘像素设定,reflect镜像填充, symmetric也是镜像填充, 这俩镜像是怎么做的看官方文档吧。镜像操作就类似于复制图片的一部分进行填充。transforms.RandomResizedCrop(size, scale=(0.08, 1.0), ratio=(3/4, 4/3), interpolation): 随机大小,长宽比裁剪图片。 scale表示随机裁剪面积比例,ratio随机长宽比, interpolation表示插值方法。FiveCrop, TenCrop: 在图像的上下左右及中心裁剪出尺寸为size的5张图片,后者还在这5张图片的基础上再水平或者垂直镜像得到10张图片,具体使用这里就不整理了。
图像的翻转和旋转
RandomHorizontalFlip(p=0.5), RandomVerticalFlip(p=0.5): 依概率水平或者垂直翻转图片, p表示翻转概率RandomRotation(degrees, resample=False, expand=False, center=None):随机旋转图片, degrees表示旋转角度 , resample表示重采样方法, expand表示是否扩大图片,以保持原图信息。
图像变换
transforms.Pad(padding, fill=0, padding_mode='constant'): 对图片边缘进行填充transforms.ColorJitter(brightness=0, contrast=0, saturation=0, hue=0):调整亮度、对比度、饱和度和色相, 这个是比较实用的方法, brightness是亮度调节因子, contrast对比度参数, saturation饱和度参数, hue是色相因子。transfor.RandomGrayscale(num_output_channels, p=0.1): 依概率将图片转换为灰度图, 第一个参数是通道数, 只能1或3, p是概率值,转换为灰度图像的概率transforms.RandomAffine(degrees, translate=None, scale=None, shear=None, resample=False, fillcolor=0): 对图像进行仿射变换, 反射变换是二维的线性变换, 由五中基本原子变换构成,分别是旋转,平移,缩放,错切和翻转。 degrees表示旋转角度, translate表示平移区间设置,scale表示缩放比例,fill_color填充颜色设置, shear表示错切transforms.RandomErasing(p=0.5, scale=(0.02, 0.33), ratio=(0.3, 3.3), value=0, inplace=False): 这个也比较实用, 对图像进行随机遮挡, p概率值,scale遮挡区域的面积, ratio遮挡区域长宽比。 随机遮挡有利于模型识别被遮挡的图片。value遮挡像素。 这个是对张量进行操作,所以需要先转成张量才能做transforms.Lambda(lambd): 用户自定义的lambda方法, lambd是一个匿名函数。lambda [arg1 [, arg2…argn]]: expression
.Resize, .ToTensor, .Normalize: 这三个方法上面具体说过,在这里只是提一下子
2.3 transforms的选择操作
对几个transforms的操作进行选择,使得图像预处理更加的灵活。
transforms.RandomChoice([transforms1, transforms2, transforms3]): 从一系列transforms方法中随机选一个transforms.RandomApply([transforms1, transforms2, transforms3], p=0.5): 依据概率执行一组transforms操作transforms.RandomOrder([transforms1, transforms2, transforms3]): 对一组transforms操作打乱顺序
到这里,关于Pytorch的transforms操作基本上就搞定, 上面只是整理了一些常用的函数,如果真的需要,具体细节还得去看官方文档。 虽然Pytorch提供了很多的transforms方法, 但是在实际工作中,可能需要自己的项目去自定义一些transforms方法,那么如果想自己定义方法,怎么做呢?
2.4 自定义transforms
我们上面的代码调试中看到了在Compose这个类里面调用了一系列的transforms方法, 还记得这个吗? 我们再回顾一遍这个运行机制:

我们对Compose里面的这些transforms方法执行一个for循环,每次挑取一个方法进行执行。 也就是transforms方法仅接收一个参数,返回一个参数,然后就是for循环中,上一个transforms的输出正好是下一个transforms的输入,所以数据类型要注意匹配。 这就是自定义transforms的两个要素。
下面给出一个自定义transforms的结构:
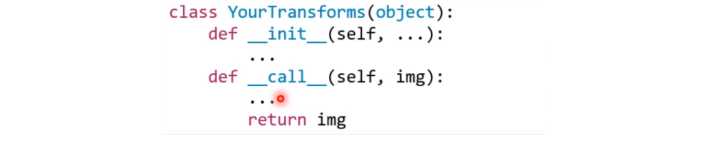
上面就是整个transforms的图像增强处理的技术了。但是实际工作中,最关键的还不是技术,而是战术,这些技术我们现在都知道了, 到时候用到的时候可以随时去查然后拿过来用。 但是我们如何去选择图像增强的策略呢? 这个才是重点。
数据增强策略原则: 让训练集与测试集更接近。
- 空间位置上: 可以选择平移
- 色彩上: 灰度图,色彩抖动
- 形状: 仿射变换
- 上下文场景: 遮挡,填充
3 总结梳理
通过这篇文章就把Pytorch的数据模块给整理完毕,依然是快速的回顾一遍:首先是整理了Pytorch的数据读取机制, 学习到了两个数据读取的关键DataLoader和Dataset,并通过一个人民币二分类的例子具体看了下这两个是如何使用的,以及它们之间的关系和原理,这个是通过debug进行描述的,debug的这种操作本身也非常重要,并且也要养成看源码的习惯。
然后又学习了Pytorch的图像处理模块transforms, 这一模块主要是整理了各种图像处理的方法,transforms的选择操作,并且从战术的角度看了一下这些方法到底什么时候用。 至于这些方法的细节,具体用到的时候查看官方文档即可, 关于transforms,我们还可以自定义。
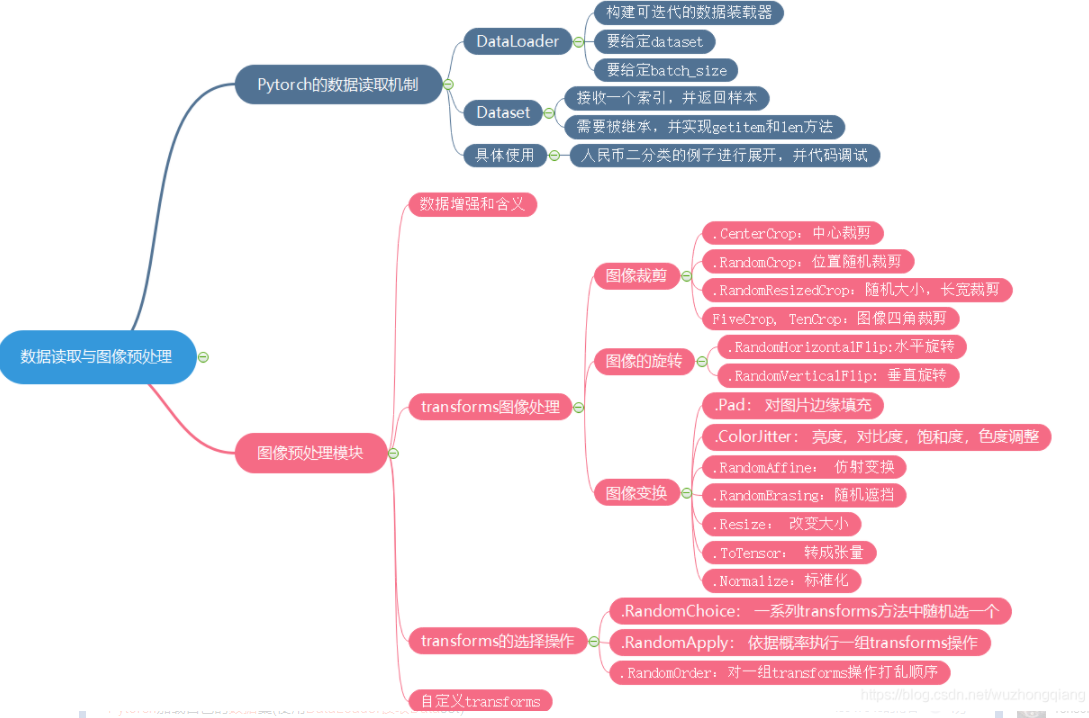
下面也是通过思维导图的方式把这一块的内容拎起来,方便以后查看学习: